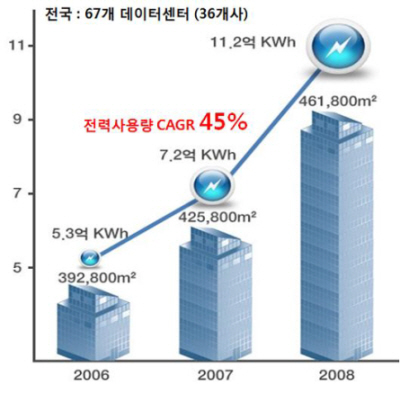
현재 국내 데이터센터는 전국 100여 곳에 이르고, 이들의 전력사용량은 20억kWh에 이릅니다. 이는 국내 전력사용량의 약 2%, 산업용 전력 사용량의 7~8%를 차지하는 수준으로, 인구 180만 명이 이용할 수 있는 전력량인데요.
최근 스마트 기기의 사용이 확산되면서 동영상 데이터가 급증함에 따라 데이터센터의 전력 사용량은 더욱 증가할 것으로 예상됩니다. 몇몇 통계에서는 데이터센터의 전력 사용량이 매년 45% 이상 증가하고 있다고 보고되고 있는데요. 이러한 데이터센터 에너지 문제에 대한 해결의 방안으로 스마트 로봇에 대한 관심이 높아지고 있습니다.
오늘은 LG CNS가 개발한 스마트로봇이 데이터센터의 전력 문제를 어떻게 해결하는지 살펴보도록 하겠습니다.
데이터 사용 증가와 데이터센터 효율성
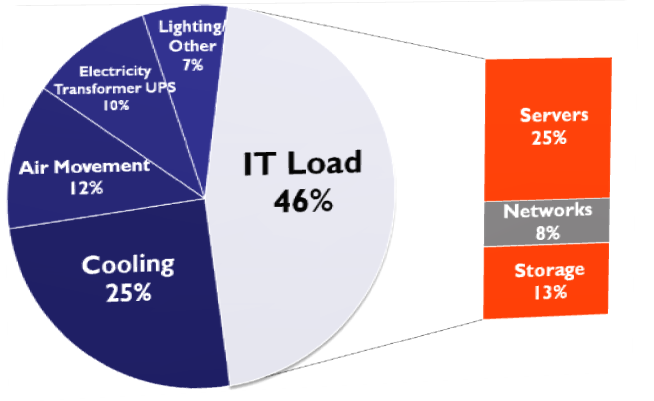
데이터센터에서 사용하는 전력을 분석해 보면, 그 중 25% 가량이 시스템 구동용 전력이 아닌 IT 장비의 냉각용도로 쓰이고 있습니다. 그래서 서버실의 온도를 1도만 낮춰도 냉방 에너지를 7% 절감할 수 있는데요. 이에 따라 데이터센터의 효율적인 냉방 공조 시설 운영에 대한 관심이 높아지고 있습니다.
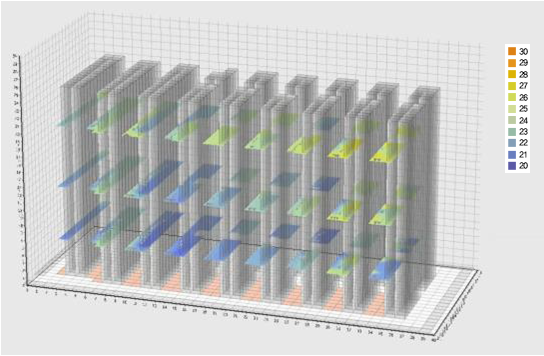
최근에는 전산 유체 역학(CFD, Computational fluid dynamics) 도입을 통한 데이터센터 운영 효율화를 도모하고 있는데요. 하지만 이는 도입비용이 상당히 높을 뿐만 아니라, 구역별 온도와 습도를 측정하는 인력이 필요합니다. 또한 이렇게 사람이 측정하는 수치에 의지하다 보면 정밀도가 떨어진다는 문제가 발생하죠. 그리고 일회성 데이터로 축적된 데이터는 활용할 수 없다는 문제도 있습니다.
스마트 로봇, 우리에게 왜 필요한 것일까?
데이터센터를 효율적으로 운영하기 위해서는 조도나 풍향, 먼지와 같은 추가적인 환경정보가 필요합니다. 실제로 이에 대한 요구도 증가하고 있는데요. 이를 위한 대안으로 등장한 것이 바로 로봇입니다. 로봇을 이용해 데이터센터에서 필요한 환경정보를 수집하고, 이를 빅데이터로 분석하여 활용하는 것인데요. 기존 공조시스템을 보다 효율적으로 관리하고 운영할 수 있는 기술인 것이죠.
로봇은 크게 제조용 로봇과 서비스 로봇으로 구분할 수 있습니다. 그 중 서비스 로봇은 전 세계적으로 연구개발이 활발히 이루어지고 있는 분야입니다. 특히, 자율구동형 로봇은 다양한 산업군에 활용될 수 있는 잠재적 가치를 가지고 있는데요. 이에 따라, 체계적인 개발을 통한 실적용 사례가 늘어나고 있습니다.
자율구동형 로봇은 스스로 경로를 움직일 수 있는 형태의 로봇으로 인력 운영이 어려운 공장 지역 등의 감시나 측정장비로서의 활용 가능성이 큽니다. 따라서 수요가 지속적으로 증가할 것으로 예상합니다.
LG CNS의 스마트로봇, 개발 및 구성
앞서 소개해드린 대로, 데이터센터의 에너지 절감은 현재 뜨거운 이슈입니다. LG CNS는 이러한 요구를 일찍부터 파악하고 스마트로봇 개발에 착수하였는데요. 스마트로봇의 개발방향은 크게 세 가지로 이야기할 수 있습니다. 첫째, 로봇 스스로 주행할 수 있어야 한다는 것입니다. 두 번째는 장애물 탐지 기능이 있어야 한다는 것입니다. 마지막은 원하는 위치에서 온도와 습도를 측정할 수 있어야 한다는 것입니다.
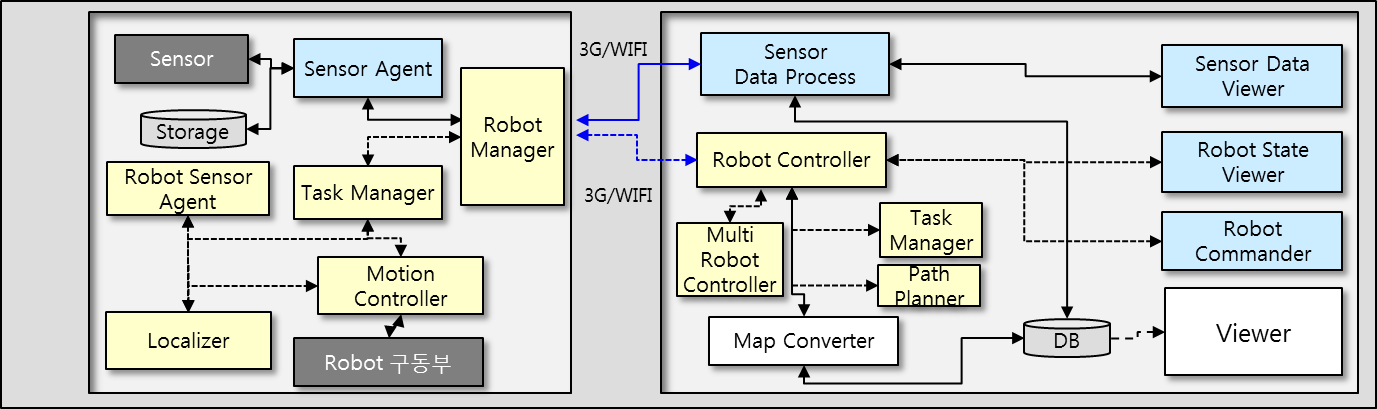
우선 자율주행 로봇을 기반으로 한 데이터센터 환경제어를 위해 위와 같이 시스템을 구성하였습니다. 크게 로봇과 제어 서버로 나눌 수 있고, 로봇에는 환경측정장비, 위치추정모듈, 운동제어모듈, 통신모듈이 있습니다. 제어 서버에는 작업경로계획모듈, 환경정보 데이터베이스, 로봇 및 환경정보 모니터링 모듈이 있습니다.
로봇과 서버 간에는 무선네트워크(WiFi)를 통해 정보를 전송하는데요. 서버실의 통로가 좁은 특성상 가까운 장애물을 감지하면 정지하고, 일정 시간 이상 장애물을 감지할 경우에는 제어 서버로 사진을 전송하여 관리자에게 상황을 알리도록 하였습니다. 관리자는 중앙모니터와 스마트폰을 이용해 로봇의 현재 상태 및 데이터센터의 환경정보를 감시할 수 있죠.
LG CNS의 스마트로봇은 사물인터넷(IoT)의 발전과 혁신을 촉진시키기 위해 구성된 컨소시엄인 올신얼라이언스(AllSeen Alliance)의 올조인 사물인터넷 플랫폼(Alljoyn IoT Platform)을 로봇으로서는 세계 최초로 적용하였는데요. 이를 통해 로봇이 측정한 온습도에 따라 공조기의 가동 여부를 스스로 판단합니다. 그래서 직접 공조기를 조절하고 장애물을 만났을 때는 현재 상황을 주변기기에도 전파할 수 있는 것이지요.
자율주행 로봇의 하드웨어는 환경측정을 위한 온습도 센서, 위치추정 및 장애물 감지에 사용되는 레이저 거리 센서, 로봇의 바퀴 굴림 정보를 얻기 위한 엔코더로 구성되어 있습니다. 내부 소프트웨어는 로봇의 위치정보를 알기 위해 몬테카를로 방법(Monte Carlo method)을 기반으로 하고 있는데요. 이는 위치추정, 궤적 추종을 위한 운동제어, 환경정보 측정 등을 효과적으로 할 수 있도록 도와줍니다.

아직 스마트로봇은 개발 초기 단계입니다. 현재 적용된 지도 기반의 자율주행 한계를 넘어 스스로 길을 탐색하고, 개척할 수 있는 로봇 알고리즘이 필요한데요. 장기적으로 봤을 때 클라우드와 기계학습(Machine Learning)을 적용해 사용할 수 있는 로봇 개발이 필요합니다.
최근 사물인터넷(IoT)을 통해 그 가능성이 열리고 있는데요. 미리 입력된 프로그램에 의한 동작이 아니라, 외부 세계와의 정보교환과 학습으로 한 차원 다른 로봇 개발이 가능해진 것이죠. 이를 통해 기존에 불가능하다고 여겨지던 것들을 로봇으로 처리할 수 있는 단계로 이어지고 있습니다. LG CNS는 이러한 IT 업계의 조류를 지속해서 흡수하여 더 나은 미래를 위한 새로운 기술을 준비하며 발전시켜 나갈 것입니다.
LG CNS 페이스북 바로가기 : http://on.fb.me/1L9mp75
글 ㅣ LG CNS IoT솔루션팀