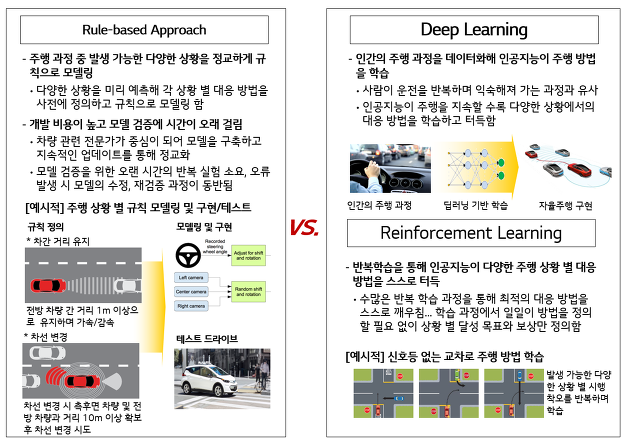
차량 주행 기능들은 최근까지도 모든 상황들이 규칙으로 정의되고 모델링 된 후 소프트웨어로 구현되는 규칙기반 방식(Rule-based approach)으로 구현되어 왔습니다. 따라서 이러한 규칙들을 정교하게 정의하고 모델링 할 수 있는 자동차 분야의 전문가를 확보하는 것이 자율주행 기능 구현의 핵심으로 작용해왔습니다.
실제 주요 ICT 기업들이 초기 자율주행 자동차를 연구, 개발 시 완성차(OEM) 업체의 전문 인력들을 대거 영입하며 팀을 구성했던 것도 이와 같은 이유였습니다. 구글은 과거 자율주행 독립 조직 설립 시 전체 170여 명의 엔지니어 중 약 40여 명의 인력을 완성차 및 Tier 1 기업에서 영입하였으며, 애플 또한 자율주행 팀 구성 시 폭스바겐, 포드 및 Bosch, Delphi 등 자동차 산업 내 전문 인력을 대거 영입하기도 했습니다.
하지만 이러한 규칙기반 방식으로 자율주행 기능을 구현하는 데는 큰 한계가 있습니다.
첫째, 매우 비효율적입니다. 산업 내 전문성을 갖춘 인력을 영입해야 하며 이들이 매우 오랜 시간에 걸쳐 정교하게 규칙들을 모델링 해야 하기 때문인데요. 또한 이렇게 만들어진 모델을 지속적으로 실제 상황에 적용해 가며 테스트를 반복해 검증하고 모델을 유지, 보수하는 과정이 동반됩니다. 구글의 자율주행 자동차가 수년 동안 걸쳐 도로 주행 테스트를 지속하는 것도 이러한 과정의 하나인 것입니다.
둘째, 확장성(Scalability)이 매우 떨어집니다. 정교하게 모델링 된 규칙을 만들었다 할 =지라도 주행 방식이 다른 국가에 적용하거나 기후적•지역적으로 주행 환경이 다른 지역에 바로 적용하는 것이 매우 어렵기 때문인데요. 이 경우 이미 만들어진 모델을 새로운 환경에 맞게 재조정하는 과정이 다시 동반되게 되며 모델링과 검증 과정이 뒤따르게 됩니다.
셋째, 아무리 정교하게 만들어진 규칙이라 할지라도 자동차 주행 중에 발생 가능한 모든 상황을 반영하는 것은 거의 불가능합니다. 일반적인 도로 주행, 차선 변경과 같은 대표적인 상황들이 아닌 수많은 예외 상황, 돌발 변수 등을 모두 다 사전에 예측해 모델링 하는 것은 매우 어려울 수밖에 없습니다. 실제 지난 2016년 구글의 자율주행 자동차의 첫 사고1가 발생한 것도 미리 예측하지 못했던 상황 발생했고 적절히 반응하는데 실패하면서 일어났습니다.
반면, 딥러닝을 기반으로 한 인공지능을 통해 자율주행을 구현하려는 방식은 과거의 방식과 크게 다릅니다. 딥러닝을 통해 구현되는 방식은 마치 사람이 운전을 배워가는 과정과 유사한데요. 딥러닝 기반의 인공지능이 장착된 차량을 사람이 운전하면 인공지능이 운전자의 주행 과정을 관찰하며 스스로 학습해 갑니다.

다른 차량의 주행 데이터도 인공지능이 학습할 수 있습니다. 마치 사람이 초보 운전 때 다른 사람이 주행하는 모습을 조수석에서 관찰하거나, 교통량이 적은 주차장, 이면 도로에서 운전을 익혀가면서 서서히 시내 주행, 고속도로 주행을 하며 운전이 익숙해지는 과정과 비슷합니다. 따라서 인공지능이 많은 주행 데이터를 학습할수록 자율주행 기능의 완성도가 높아지게 됩니다.
여기서 많은 양의 주행 데이터는 단순히 오랜 시간의 주행 데이터보다는 다양한 주행 환경 및 상황에서 사람들이 반응하는 과정이 포함된 다양한 데이터를 의미합니다.
즉 안정적인 주행이 지속되는 상황의 데이터를 많은 양으로 확보하기보다는 각종 위험 상황과 예측하기 어려운 사고에 대응하는 것과 같은 다양한 상황의 주행 데이터가 더욱 중요한 의미를 갖는 것입니다. 이는 딥러닝 기반의 인공지능이 데이터를 통해 다른 사람의 시행착오를 학습해 향후 유사한 상황에 대응하는 방법을 배워 나가는 과정이기 때문입니다.
따라서 딥러닝 기반의 자율주행 구현 방식은 과거 방식과 달리 자동차 산업 내 전문성보다는 인공지능, 특히 딥러닝 관련 소프트웨어 역량과 데이터가 핵심적인 역할을 하게 됩니다. 실제 최근 등장하고 있는 자율주행 관련 스타트업들은 딥러닝 전공의 전문가들이 주행 데이터를 가지고 자율주행 기능을 구현해내고 있습니다.
2015년 창업된 drive.ai는 창업 당시 8명의 멤버 중 6명이 스탠퍼드대 인공지능 연구실의 딥러닝 전공의 박사과정 학생들이었습니다. 이들은 카메라를 통한 인식 과정에서부터 주행 기능 구현에 이르기까지 자율주행 전 과정을 딥러닝만을 가지고 구현했는데요. 단순히 차량 간의 거리를 조정하고 충돌을 방지하는 수준을 넘어(Level 3) 교통 표지판, 신호등 등을 정확히 인식해 목적지까지 완전 자율주행이 가능한 수준까지(Level 4) 기능을 구현하고 있습니다.

특히 drive.ai는 비가 오거나 어두운 밤과 같이 사람이 주행하기 쉽지 않은 상황에서의 주행 데이터를 집중적으로 학습시켜 매우 어려운 상황에서도 차량이 안전하게 주행할 수 있도록 기능을 고도화하고 있습니다.
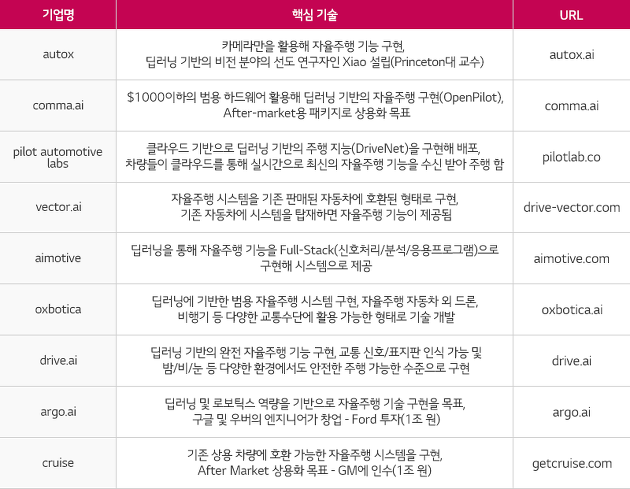
drive.ai 뿐만 아닌 최근 다양한 혁신 스타트업을 중심으로 이러한 방식의 인공지능 기술을 기반으로 자율주행 기술을 구현하는 기업들이 빠르게 출현하고 있습니다.
글 l 이승훈 책임연구원(shlee@lgeri.com) l LG경제연구원
- 구글 자율주행 자동차가 장애물을 회피하며 차선 변경 시 버스와 충돌(2016년 2월 14일 발생) [본문으로]


