
“모든 도구가 명령에 따라 혹은 자발적으로 그 목적에 적합한 작업을 할 수 있다면… 전문가를 위한 조수나 주인을 위한 종이 필요하지 않을 것이다.”
– 아리스토텔레스(384–322 B.C), 정치학.
인류는 지렛대로 힘을 키워 커다란 돌을 움직이거나, 도르래로 기중기를 만들어 무게가 있는 물건을 들어올리는 등 도구를 개발해 왔는데요. 그 후로도 지속적으로 스스로 할 수 없는 작업을 대신 수행하거나, 삶을 더 안전하고 편리하게 해주고, 생산성을 높여줄 도구를 만들어 왔습니다.
로봇은 이러한 개념의 연장선상에 있는 것으로서, 프로그래밍이나 개조를 통해 다양한 작업을 수행할 수 있을뿐만 아니라 인간의 관리•감독이 없는 상태에서 오랫동안 작업을 수행할 수 있는 기계를 의미합니다.
또한 로봇은 인간이 하는 것과 유사한 작업을 더 강하고 정밀하면서도 오류 없이 정확하게 반복하기 위한 용도로 제작하기도 하고, 인간이 작업하기 어렵거나 완전히 불가능한 환경에서 작업을 수행하기 위한 용도로도 제작하기도 합니다.
로봇 산업의 시작은 미미했지만, 지금까지 급성장해 왔습니다. 예를 들어 아이로봇의 룸바 로봇청소기는 전 세계적으로 1,050만 대 이상 팔렸습니다.
한국의 경우만 보더라도 로봇 매출액은 2009년 9억 4,000만 달러에서 2012년 20억 달러로 급상승했으며, 한국로봇협회(KAR) 유태준 부회장은 한국의 로봇 관련 매출액이 2022년이 되면 250억 달러 규모로 성장해 있을 것이라고 예측했습니다.
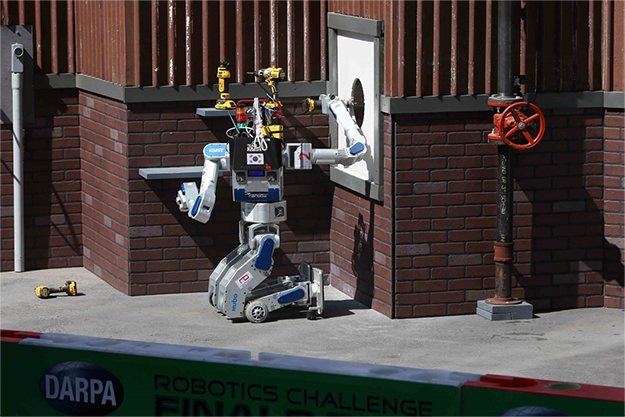
한국의 카이스트에서는 2015년 명망 높은 DARPA 로봇공학 챌린지 결선 대회에서 ‘트랜스포머’와 유사한 DRC-HUBO 로봇으로 우승을 차지했습니다. 이 로봇은 인간의 모습에서 무릎을 꿇고 바퀴로 달리는 모습으로 변신하여 불안정한 지형에서 더 빠르고 안정적으로 이동할 수 있었습니다.
또한 로봇은 활화산의 입구에 들어가기도 하고(Dante II), 남극에서 운석을 발견하기도 했으며(Nomad), 고대 이집트 피라미드에 있는 불가사의한 터널을 조사하고(Upuaut 2) 인간의 수술을 지원하기도 했습니다(Zeus, da Vinci, Robodoc 및 기타).
미국의 IT 전문 매체인 Venturebeat에 따르면, 300만 대 이상의 산업용 로봇이 공장, 연구실, 기타 시설에 배치되어 부품과 제품의 용접, 도색, 조립, 집어다 놓기와 같은 작업을 수행하고 있으며 향후 더 많은 로봇이 도입될 예정입니다.(2015년에만 약 248,000만대의 새로운 산업용 로봇이 판매됨)
이외에도 수많은 로봇이 교육 등 여러 분야에 배치되어 코딩 수업 및 엔지니어링, 컴퓨팅, 인간과 기계의 상호 작용 연구에 실제적인 도움을 주고 있습니다.

이 모든 것이 어디에서부터 시작되었을까요? 자동으로 일할 수 있는 기계에 대한 개념은 고대 그리스 시대에 최초로 자동화 제품을 사용하면서부터 정착되었습니다.
‘스스로 움직이는 것’을 의미하는 그리스 단어 ‘오토마토스(automatos)’는 생명체와 유사하게 작업을 완수할 수 있는 기계를 가리킬 때 사용되었습니다. 이 단어는 특히 중세 이후 유럽에서 생명체처럼 움직이는 기계를 만들기 위해 시계 제작자의 기술과 기계학적 원리를 활용하여 제작된 수많은 기계들을 칭하게 되었습니다.
이는 자크 드 보캉송(Jacques de Vaucanson), 아버지와 아들 관계인 피에르(Pierre) 및 헨리 루이스 자크-드로스(Henri-Louis Jacquet-Droz)와 같은 프랑스의 유명한 자동기계장치 제작자들이 시계 장치에 기반을 둔 정교한 메커니즘을 통해 모형 인형이 현실의 인간과 유사한 작업을 수행할 수 있도록 하는 작품들을 만들어 내면서 절정에 이르렀습니다.
자크-드로스의 글 쓰는 자동인형은 6,000개가 넘는 정교한 내부 부품으로 구성되었고, 미리 정해놓은 문구를 깃털 잉크펜으로 작은 종이 위에 적을 수 있었으며, 페이지에 글을 써 내려가는 동안 머리를 움직일 수도 있었습니다.
오토마타(Automata, 스스로 작동하는 기계)는 미리 정해진 특정 작업을 수행했으며, 외부의 자극에 반응하거나 그에 맞추어 작업을 수행하는 것은 대부분 불가능했습니다.
심지어 20세기에 전기공학의 진보와 더불어 탄생한 웨스팅하우스(Westinghouse) 사의 ‘일렉트로(Elektro)’와 같은 오토마타들 역시 대부분 원격으로 제어되는 기기였으며, 주변 환경에서 피드백을 수집하여 동작을 수정하는 것은 불가능했기에 진정한 로봇의 단계에 이르지는 못했습니다.

(출처: https://goo.gl/cUjmJh)
‘로봇’이라는 용어는 일렉트로보다 18년 앞선 1921년에 체코 작가 카렐 차페크(Karel Čapek)의 연극인 R.U.R. (Rossum’s Universal Robots, 로섬의 만능 로봇)에 등장했으며, ‘강제 노동 혹은 고된 일’을 의미하는 체코 단어 ‘로보타(Robota)’에서 유래했습니다.
차페크의 극에서 ‘로보티(Roboti)’라고 알려진 기계는 인간에 대항하여 반란을 주도하는데, 이는 이후 많은 공상 과학소설의 공통된 주제로 활용되었습니다. 또 다른 작가인 아이작 아시모프(Isaac Asimov)는 그의 여러 단편 소설에 로봇을 묘사했으며 1942년 단편 소설인 런어라운드(Runaround)에서 그의 유명한 3가지 로봇 공학 법칙을 소개합니다.
그리고 2명의 엔지니어가 1956년 칵테일 파티에서 둘 다 아시모프의 작품을 좋아한다는 사실에 유대감을 형성하여 로봇이 공상과학이 아닌 현실이 되도록 하는 데 협력했습니다.
조셉 엥겔버거(Joseph Engelberger, 1925-2015)는 콜럼비아 대학에서 물리학을 공부한 전기공학자였으며 Manning, Maxwell & Moore 사에서 항공 제품 엔지니어로 근무했습니다. 1956년에 그는 발명가이자 엔지니어인 조지 데볼(George Devol, 1912-2011)을 만납니다.
데볼은 필름 산업에서 소리를 녹음하기 위해 포토셀을 사용하던 것에 착안하여 United Cinephone 사를 설립하고 최초의 자동문 중 하나인 Phantom Doorman을 만들었습니다. 이는 움직임을 감지하기 위한 간단한 센서로 포토셀을 활용하여 문을 열어주는 장치였습니다.
1950년대에 데볼은 반복되는 작업을 정확하게 수행할 수 있는 기기를 개발했으며 그는 이를 가리켜 프로그램화된 물품 운반 장치(Programmed Article Transfer)라고 불렀습니다. 엥겔버거와 소규모 인원으로 구성된 팀은 이를 발전시켜 세계 최초의 산업용 로봇을 만들었으며 ‘Universal Automation(범용 자동화)’를 줄여 ‘Unimate(유니메이트)’이라고 이름 붙였습니다.
유니메이트는 무게가 2톤에 가까운 로봇 팔로서, 유압 작동기로 가동되어 150킬로그램에 달하는 금속 부품을 들어 올릴 수 있었습니다. 이 로봇은 자기 드럼에 저장된 프로그램으로 제어되었으며, 금속 물체를 잡아서 이동하는 동안 관절 엔코더로 로봇 부품의 각도와 위치를 측정했습니다.
이 로봇을 홍보하고 판매하기 위해 엥겔버거가 설립한 유니메이션(Unimation) 사는 로봇의 정확도가 밀리미터 당 0.003밀리미터 이내라고 주장했습니다.
업계 관계자들의 상당수는 그러한 로봇의 정확도와 신뢰도에 대해 회의적이었습니다. 하지만 1961년, 자동차의 문 손잡이와 내부 설비를 만드는 뉴저지 주의 트렌튼에 위치한 제너럴 모터스의 Ternstedt 공장에 유니메이트가 최초로 설치되었습니다.
이 로봇은 뜨거운 다이캐스트 금속 부품을 다루는 작업에 투입되었습니다. 로봇이 용광로에서 나온 금속 부품을 냉각수에 식히고 공장의 제조 라인을 따라 이동시키면 연마를 비롯한 추가 공정이 진행되었습니다.
뜨거운 금속을 다루는 것은 사람이 하기에 위험한 작업이었지만, 유니메이트는 이를 처리해 내었고 1971년에 10만 시간의 가동시간을 기록했습니다. 그 후 얼마 되지 않아 제너럴 모터스는 이 로봇을 스미스소니언 박물관에 기증했습니다.
유니메이트는 자재 취급 외의 응용 분야에 이를 활용하기 원하는 몇몇 다른 나라의 기업에도 라이선스 하에 제작되었습니다. 유니메이트의 라이벌 로봇도 출연했습니다.
그 중 하나는 AMF 사의 ‘버사트란(Versatran)’이었는데, 이는 포드 자동차 공장에 일자리를 얻게 되었고 1967년에는 일본이 수입한 첫 로봇이 되었습니다. 비슷한 시기에 노르웨이의 Trallfa 사에서는 최초의 스프레이 페인팅 로봇을 개발해 노르웨이의 공장에 손수레를 페인팅하는데 투입되었습니다.
1966년에 엥겔버거는 당시 높은 시청률을 자랑하던 조니 카슨(Johnny Carson)의 TV 토크쇼에 출연하여 유니메이트가 골프채를 휘두르고, 지휘자의 지휘봉을 흔들며, TV 쇼 사회자에게 맥주를 따라주는 등 사람들이 좋아할 만한 묘기를 보여줌으로써 유니메이트를 홍보하고 거래량을 늘리고자 했습니다.
이로 인해 유니메이트를 지역 박람회와 모금 행사에 유치하려는 요청이 쇄도했지만, 자동차 산업을 제외한 유니메이트의 미국 내 판매량은 지지부진한 상태였습니다.
엥겔버거는 해외로 눈을 돌려 영국의 Guest, Keen & Nettlefold, 핀란드의 Nokia Ab와의 제휴를 통해 로봇을 제작하여 동유럽과 스칸디나비아반도의 나머지 국가 및 일본에 판매했으며, 특히 가와사키 중공업과 강력한 유대 관계를 맺고 1969년 파트너십 계약을 맺었습니다. 일본은 이후 수십 년간 산업용 로봇의 세계 강자로 부상하게 됩니다.
로봇공학에 점점 정교한 컴퓨팅 기술을 접목하면서 로봇 팔은 1970년대에 급격히 발전했습니다. 이로 인해 최초로 순수 전기 모터로 구동되는 로봇이 구현되었습니다. 1973년 KUKA에서 이를 최초로 시도했으며, Cincinnati Milacron 사의 리처드 혼(Richard Hohn)은 마이크로컴퓨터로 제어되는 최초의 로봇 팔 T3(The Tomorrow Tool이라고도 함)를 개발했습니다.

같은 시기에 일본 와세다 대학의 이치로 카토(Ichiro Kato)는 세계 최초의 실물 크기 휴머노이드 로봇인 와봇-1을 개발했습니다. 이는 오늘날의 진짜 사람과 같은 휴머노이드 로봇과는 한참 거리가 있었지만, 와봇-1은 당시로서는 로봇 역사에 한 획을 그은 사건이었습니다.
이 로봇은 물체와의 거리를 측정하고 물건을 잡았으며, 느리고 불안정하게나마 걸을 수도 있었습니다. 최초의 이동식 로봇 역시 와봇-1과 마찬가지로 흔들리며 움직였기 때문에 ‘셰이키(Shakey, 흔들림)’라는 이름이 붙었습니다. 스탠퍼드 연구소의 인공지능 센터 연구원들이 개발한 셰이키는 높이가 1.75미터였고 평평한 단 아래에 바퀴가 달린 모양을 하고 있었습니다.
1966년에서 1972년 사이에 개발된 이 로봇은 TV 카메라를 비롯한 센서를 통해 정보를 수집하여 주변 환경을 제한적으로나마 이해할 수 있었고, 거리계로 거리를 측정하며 범퍼에 장착된 근접 센서를 통해 실제 물체와의 접촉과 충격을 감지할 수 있었습니다.
셰이키는 LISP와 FORTRAN 언어로 프로그래밍된 컨트롤러를 통해 데이터를 확보하여 결정을 내리고, 그에 맞게 움직임을 계획하여 여러 개의 방들을 이동할 수 있었습니다. 셰이키는 최초의 자율 이동식 로봇으로 널리 알려져 있습니다.
셰이키의 하드웨어는 상대적으로 원시적이었고 그 움직임이 현실에 활용하기에는 많이 느리긴 했지만, 이 로봇이 결정을 내릴 수 있도록 하기 위해 개발된 소프트웨어 중 일부는 미래에 큰 영향을 주었습니다.
이 로봇의 컨트롤러를 제작하기 위해 개발된 일명 A* 알고리즘이라고 하는 최상 우선 탐색 알고리즘(Best-First Search Algorithm, 가능한 모든 옵션을 검색하여 시간, 거리, 에너지 등 비용이 가장 적은 해결책을 찾아 문제를 해결)은 이후 발전을 거쳐 지도 제작에서 컴퓨터 게임에 이르기까지 다양한 응용 분야에 활용되었습니다.

(출처: https://goo.gl/AL90YS)
이동식 로봇공학의 발전을 이끈 주요 동인은 군대에서 센서가 장착된 지능형 정찰기로 사람보다 먼저 불발탄이나 기타 치명적일 수 있는 위협이나 위험을 탐지할 필요가 있었기 때문이고, 우주 탐사 분야에서는 우주로 보내 다른 천체의 표면을 탐사할 이동식 로봇이 필요했기 때문이었습니다.
1970년대에 이들 두 분야에서의 자금 지원이 늘어나면서 대규모의 연구팀이 참여하여 실용적인 이동식 로봇의 제작에 진전이 있었습니다. 그 결과, 배관의 누출과 파손을 감지할 수 있는 배관 주행 로봇에서부터 울툴불퉁한 지형을 이동하여 탐색과 구조, 재해 구호 혹은 환경 모니터링을 지원하는 바퀴형 또는 궤도형 로봇에 이르기까지 실용적인 분야에 활용할 수 있는 로봇이 생겨났습니다.
1980년대에 엥겔버거는 다시금 새로운 분야의 선봉장으로 섰습니다. 바로 공장뿐 아니라 서비스업에도 로봇을 배치하는 일에 착수한 것입니다.
1982년, 그는 1930년대에 일렉트로 오토마타를 제작한 웨스팅하우스 사에 유니메이션 사를 매각하고 병원에서 담요와 의약품, 기타 물품을 운반하는 데 사용된 무인운반차인 헬프메이트(HelpMate)를 개발하여 의료진이 환자의 치료에 더 많은 시간을 할애하도록 도움을 주었습니다.

서비스 로봇은 아직 상대적으로 미성숙 단계에 머물러 있습니다. 소수의 로봇이 여행 가이드, 접수원, 바텐더로 활용될 수 있는지 시험을 거친 상태입니다. 하지만 이보다 훨씬 많은 수의 로봇이 수영장, 유리창 및 바닥 청소, 잔디깎이 용도로 활용되고 있으며, 점점 더 많은 수의 기계가 어느 정도 수준의 보안 모니터링을 제공하고 있습니다.
엥겔버거에 따르면 가정은 로봇공학의 발전을 위한 새로운 장이 될 것이라고 합니다. 그는 2008년 Electronic Design 지와의 인터뷰에서 다음과 같이 말했습니다.
“산업 영역에서 개발된 기술을 활용한다면 서비스 영역에서 로봇공학의 무궁무진한 발전이 가능할 것입니다. 진정으로 흥미로운 시대가 열리는 것이죠. 가정용 로봇이 연로하거나 장애가 있는 분들의 반려자가 되어 드리고, 물건을 가져오거나 이동해 주는 것과 같은 일을 수행하며, 냉장고에서 음식을 찾아주고, 요리하고 청소를 하며 대화도 해 줄 테니까요.”

[‘A Smart, Creative World: Past and Future’ 연재 현황]
(1) 컴퓨터의 탄생, 시대를 앞서간 ‘찰스 배비지(Charles Babbage)’
http://blog.lgcns.com/950
(2) 최초의 컴퓨터 프로그래머, 에이다 러브레이스
http://blog.lgcns.com/982
(3) ENIAC: 세계 최초의 빠른 컴퓨터
http://blog.lgcns.com/1001
(4) 디버깅의 신화, 그레이스 호퍼(Grace Hopper)
http://blog.lgcns.com/1021
(5) 초기 컴퓨터의 진화
http://blog.lgcns.com/1042
(6) 컴퓨팅의 미래를 보여준 더글러스 엥겔바트
http://blog.lgcns.com/1060
(7) 웹의 발명: 팀 버너스 리(Tim Berners-Lee)
http://blog.lgcns.com/1165
(8) 인터넷의 탄생
http://blog.lgcns.com/1171
(9) 위키의 탄생
http://blog.lgcns.com/1175
(10) 로봇의 발전
http://blog.lgcns.com/1182
글 ㅣ클라이브 기포드 (Clive Gifford)
- 관련 자료
Robots: From Science Fiction To Technological Revolution – Daniel Ichbiah, Harry N Abrahams, 2005.
사진으로 가득한 540페이지 분량의 안내서로, 오토마타와 그 이전의 다른 장치에 관한 자료를 통해 다양한 분야의 로봇을 소개합니다.
The Robot: The Life Story Of A Technology – Lisa Nocks, John Hopkins University Press, 2008
로봇공학과 이 분야에서 만들어 낸 기계의 역사를 요약한 책입니다.
Robotics In Service – Joseph Engelberger, Springer, 2013
서비스 로봇공학 분야의 연구에 관해 엥겔버거가 1989년에 저술한 영향력 있는 책의 재발행본입니다.
Autonomous Robots: From Biological Inspiration to Implementation and Control – George A. Bekey, MIT Press, 2005
Red Rover: Inside the Story of Robotic Space Exploration, from Genesis to the Mars Rover Curiosity – Roger Wiens, Basic Books, 2013
우주 탐사 분야에서 로봇공학의 연구와 개발의 역사를 심도 있게 다룬 책입니다.
로봇공학 분야에 혁신을 가져온 조셉 엥겔버거의 업적을 기리고 유니메이트 로봇에 대한 정보를 제공하는 글입니다.
http://www.robotics.org/joseph-engelberger/
셰이키 로봇의 50주년을 기념하여 셰이키 로봇의 개발에 관한 흥미로운 통찰력을 제공하는 글입니다.
http://www.gizmag.com/shakey-robot-sri-fiftieth-anniversary/37668/
팀 카이스트의 DRC-HUBO 로봇이 2015년 DARPA 로봇공학 챌린지에서 우승을 차치한 비결을 다룬 보고서입니다.
http://spectrum.ieee.org/automaton/robotics/humanoids/how-kaist-drc-hubo-won-darpa-robotics-challenge


