4차 산업혁명은 우리의 삶을 하루가 다르게 변화시키고 있습니다. 2016년, 4차 산업혁명은 인공지능과 로봇으로 그 시작을 알렸고, 계속해서 많은 제품과 기술이 전 세계에서 등장하고 있는데요. 누가 먼저 기술을 개발하여 선점하느냐가 뜨거운 감자로 부상하면서 서로 경쟁을 하는 상황입니다.
4차 산업혁명에 영향을 받는 분야 중 하나인 서비스 로봇 시장도 많은 변화를 겪고 있습니다. 기존 서비스 로봇은 모든 기능을 탑재하고자 했지만, 4차 산업혁명으로 클라우드 기능이 융합되면서 서비스 로봇의 개발방향이 달라졌습니다.

지금까지의 서비스 로봇은 안내데스크나 청소 로봇으로 많이 알려졌습니다. 일반적으로 덩치가 크고 비싸다는 통념 때문에, 가까이하기에는 너무 먼 상대였죠. 그런데 최근, 도요타 자동차에서 ‘Kiboro’라는 이름의 손바닥에 올려놓을 수 있는 작은 크기의 애완용 로봇을 개발했습는데요. ‘Kiboro’는 우리 인간과 대화하고 생각을 나누며 새로운 즐거움을 주고 있습니다.

로봇은 사회 문제 해결을 위해서도 사용되고 있습니다. 고령화 사회가 되면서 노인계층의 친구가 되어주고, 심리치료도 가능한 로봇이 등장한 것입니다. 2015년에는 페퍼(pepper)라는 인간과 대화할 수 있는 로봇이 개발되어 큰 반향을 일으켰습니다.
이처럼 로봇은 여러 목적에 따라 다방면으로 활용되고 있는데요. ‘Kiboro’나 ‘페퍼’에서 한 단계 더 발전한 형태가 ‘클라우드 서비스 로봇’이라고 할 수 있습니다.
클라우드 서비스 로봇이란, 과거처럼 모든 하드웨어와 소프트웨어가 하나로 결합되어 정보와 기능을 모두 가진 로봇 구조가 아니라 웹 기반의 클라우드 환경에서 행동 지침을 내려받는 로봇을 말합니다. 로봇의 센싱정보를 클라우드로 보내면, 클라우드 기반의 데이터베이스에서 정보처리와 인공지능 패턴인식 분석 등의 기능을 수행한 후 로봇에게 행동지침을 내려보내는 것이죠.
따라서, 클라우드 서비스 로봇은 이전처럼 몸집이 클 이유도 필요도 없습니다. 인터넷 환경에서 정보를 잘 전달하고 받기만 하면 되기 때문인데요. 앞에서 설명한 ‘Kirobo’나 ‘페퍼(pepper)’는 클라우드 서비스 로봇의 상용화를 한발 앞서 실현한 제품이라고 볼 수 있습니다.
클라우드 로봇의 출발
최초의 클라우드 로봇 아이디어는 2000년 일본 도쿄대학의 한 교수가 제기한 “Remote-Brained Robots”의 개념을 꼽을 수 있습니다. 하드웨어와 소프트웨어를 분리한 이 새로운 개념은 센서나 모터 등의 간단한 하드웨어로 구성된 로봇이 원격에서 제공되는 소프트웨어를 통해 구동될 수 있다는 가능성을 제시했습니다.

이후 2010년 제임스 커프너(James Kuffner)가 기존의 로봇의 발전과정을 토대로 클라우드 컴퓨팅과 로봇기술결합의 가능성을 처음 제시하였는데요. 이때 ‘클라우드 로봇’이라는 명칭이 본격적으로 등장했습니다. 이후에 스티븐 커진스(Steve Cousins)가 그 개념을 “로봇은 더 이상 섬이 아니다.”라고 요약하며 본격적인 연구가 시작되었죠.
2011년 5월, 구글은 구글 I/O 콘퍼런스에서 ‘클라우드 로보틱스’의 개념 및 구현, 향후 진화 방향에 대해서 발표했습니다. 그리고 10월의 IEEE IROS에서도 하드웨어 관련 발표가 주류를 이루었던 업계 세션에서 ‘클라우드 로보틱스’를 소개함으로써 다시 한번 주목을 받았습니다.
클라우드 로봇의 동작원리
클라우드 로봇은 웹 기반의 클라우드 환경을 활용합니다. 기존의 로봇과 다르게 해당 정보를 원격으로 저장하고 처리하는데요. 가상의 저장 공간인 클라우드의 용량에 따라 무한의 정보를 저장하고 다양한 명령을 받아서 실행할 수 있습니다.
로봇의 몸체에 부착된 센서들이 물체와 사람의 이미지, 소리, 냄새, 촉감 등의 외부환경을 인식해 데이터를 클라우드로 보냅니다. 그러면, 클라우드 내의 검색엔진, 머신러닝, 딥러닝 등의 인공지능이 모션 생성, 환경인지, 상황인지, 지식 검색 등을 수행하여 로봇의 행동을 결정합니다. 로봇에 들어가는 컴퓨팅 파워를 줄이고, 웹 기반의 서버를 사용하여 대용량 데이터를 로봇 몸체에 전부 저장하는 것이 아니라 클라우드에서 받는 것이죠.

로봇이 몸체로써 하드웨어 역할을 하며, 동작 환경에 맞게 로봇에게 필요한 자원을 최대한 활용하여 저비용의 로봇 서비스를 창출할 수 있게 됩니다.
로봇이 점점 더 복잡한 환경을 인지하고 인간과 더욱 자연스럽게 커뮤니케이션을 하기 위해서는 기하급수적인 양의 방대한 데이터가 필요합니다. 기존의 로봇은 이러한 방대한 정보를 저장하고 처리할 수 없기 때문인데요. 클라우드 로봇은 기존 로봇이 가졌던 물리 상의 한계를 극복하여 자체적으로 원격에 저장된 정보를 상황에 맞게 사용할 수 있도록 했다는 점에서 주목할만 합니다.
기존 로봇의 한계를 극복한 클라우드 로봇은 정보 처리를 더욱 빠르고 정밀하게 할 수 있습니다. 그렇기에, 최근 공학계는 클라우드 로봇 개발에 박차를 가하고 있는 모습입니다.
클라우드 로봇의 국내외 플랫폼 연구현황
클라우드 로봇은 플랫폼이 매우 중요합니다. 국내외에서도 플랫폼 연구가 진행 중인데요. 아직 국내는 플랫폼 관련된 연구가 거의 없어, 클라우드 서비스 로봇 연구가 미흡하다고 볼 수 있습니다. 반면, 해외는 클라우드 로봇 관련 플랫폼 연구, 개발 등을 활발히 전개하며 시장을 넓혀가고 있습니다.
1.클라우드 로봇 관련 해외 연구현황
① 유럽연합 ‘RoboEarth’
유럽연합은 2006년 제7차 연구개발 기본계획(FP7)의 일환으로 로봇 협업 과제를 수행했습니다. 과제 수행을 하며 로봇이 정보를 공유하고 행동과 환경에 대하여 서로 학습하는 DB 리포지토리(repository)를 설계했는데요. 즉, 로봇용 클라우드를 구축하여 관련 정보를 찾아 배우게 하는 시스템을 설계한 것입니다.
이것은 클라우드 로보틱스 인프라를 제공하는 로봇 운영체제(Robot Operating System : ROS)를 기반으로 개발된 시스템인데요. 하드웨어 추상화 계층을 도입하여 개발된 컴포넌트가 관련 DB에 접속하여 원하는 정보를 얻는 구조입니다.
유럽연합의 ‘RoboEarth’의 DB에는 내비게이션을 위한 지도, 작업 지식, 개체 인식 모델이 있으며, ‘RoboEarth’는 Database 계층, Cloud Engine 계층, Client 계층으로 나뉩니다.
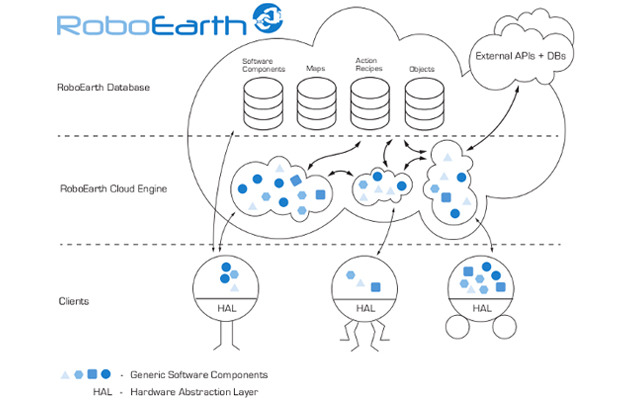
Database 계층은 가상 공간에서 시뮬레이션할 수 있는 정보, 물체 정보, 지도 정보, 조작에 필요한 정보가 저장되어있는 계층입니다. 그리고 Cloud Engine 계층은 Client 계층의 요청을 받아 Database 계층의 정보 전송과 알고리즘을 수행하고 수행 결과를 Client 계층으로 전송하는 계층입니다. Client 계층은 사용자가 만든 로봇을 말합니다.
현재 ‘RoboEarth’기술이 세계적으로 가장 최신의 기술이라고 할 수 있는데요. 성능이 우수하여 우리나라도 이 기술을 모델로 개발하는 추세입니다.
② 로봇 클라우딩 컴퓨터 프레임워크 ‘DAvinCi’
2010년, 싱가포르 국가 조사 및 개발 단체인 ‘A*STAR Social Robotics Laboratory(ASORO)’에서 로봇의 클라우드 컴퓨팅을 위한 프레임워크인 ‘DAvinCi’를 개발했습니다. 로봇의 Fast SLAM 기능을 클라우드에서 구현하는데 성공한 것이죠.
DAvinCi의 아키텍처는 클라우드 서비스를 연결하는 게이트웨이와 무선 인터넷 인프라 그리고 임베디드 컨트롤러가 필요합니다. 로봇과의 연결을 통해 중앙 컨트롤러에 자신의 센서 정보를 업로드하여 라이브 세계 지도를 구축할 수도 있는데요. 나중에 온디맨드(on-demand) 서비스로 로봇에 맵섹션을 제공한다고 합니다.
DAvinCi 환경은 파이오니어 로봇, 룸바, Rovios 및 SRV-1으로 구성되어 있습니다. ROS 플랫폼은 로봇 에이전트와 클라이언트가 센서 데이터 수집과 통신을 하기 위해 사용되는데요. 데이터 저장을 위한 하둡 분산 파일 시스템(HDFS)을 사용하며 하둡맵•센서 데이터와 영상 정보의 일괄 처리를 수행하기 위한 프레임워크입니다.
③ 윌로 개러지의 다목적 로봇 ‘PR2’
빨래 개는 로봇으로 유명한 ‘PR2’는 ROS를 개발한 로봇 전문 회사 ‘윌로 개러지(Willow Garage)’에서 만들었습니다. 2011년 5월부터 구글의 투자를 받은 윌로 개러지는 클라우드 활용 로봇인 ‘PR2’를 개발했는데요. 클라우드 로봇 기술의 공유를 위해 MIT와 뮌헨공대 등 세계 최고 수준의 로봇 연구실 20곳에 무료로 기술을 제공했습니다. 윌로 개러지는 기존의 OS와는 차별되는 이와 같은 개방형 운영체제를 도입하여 클라우드 로봇 기술 발전에 이바지했습니다.

④ 구글 ‘클라우드 로보틱스’
2011년 5월 구글은 구글 I/O 컨퍼런스에서 클라우드 환경을 활용한 ‘클라우드 로보틱스’의 개념 및 구현과 향후 진화 방향에 대해서 발표했는데요.
통상 로봇이 사람과 생활공간을 공유하며 서비스를 제공할 때, 스스로 환경을 이해하고 사람의 의도를 파악하며 작업을 수행하기는 어렵습니다. 그러나, ‘클라우드 로보틱스’에서는 로봇이 웹상의 자원을 이용해 복잡한 작업 수행에 필요한 정보를 저장하고, 검색하는 등 우수한 성능을 보유하고 있습니다.
2.클라우드 로봇관련 국내 연구 동향
① URC(Ubiquitous Robotic Companion)
국내에서는 기존의 로봇 개념에 네트워크를 활용하는 URC 과제를 추진하면서 클라우드 로봇의 개념을 일부 사용했습니다.
이 과제에서는 서버를 이용해 센서와 IT 기기와 로봇들이 연동되도록 제어하고, 서버의 컴퓨팅 능력을 빌려서 사용하는 기능을 구현하고 있는데요. 클라우드 로봇에 있는 컴포넌트 혹은 앱을 다운로드 받아서 수행하거나 로봇의 데이터를 저장하는 기능 등은 없으므로 제한적인 클라우드 로봇 개념을 구현하고 있다고 볼 수 있습니다.
② OPRoS(Open Platform for Robotic Services)
OPRoS는 로봇의 주요기능을 구현하는 응용 소프트웨어인 컴포넌트를 실시간으로 구성, 편집하고 다운로드 등을 실행시키는 우리나라 최초의 서비스 로봇 플랫폼입니다. 로봇 소프트웨어 개발을 목표로 구현되었죠.
OPRoS는 로봇 기능제어 관련 응용소프트웨어 콘텐츠 지원을 목적으로 하고 있습니다. 서버의 컴퓨팅 인프라를 활용하고, 데이터와 정보의 저장 및 재사용을 고려하지 않았다는 점에서 클라우드 로봇의 개념을 부분적으로 활용했다고 볼 수 있습니다. 그러나, 아직 공통된 데이터 포맷이나 데이터분산처리 알고리즘에 관한 연구는 미비하다고 판단됩니다.
③ 서울시립대 다수로봇 클라우드 시스템
다수 로봇이 측정하고 수집한 데이터를 통합 관리하고 필요에 따라 다른 로봇으로 전송하는 클라우드 시스템을 말합니다. 클라우드 시스템상에서 실시간으로 데이터가 갱신되어, 어느 하나의 로봇이 측정한 값을 다른 로봇들에게 빠르게 공유할 수 있는 구조입니다.
공통 데이터포맷 자체를 정의하지는 않았기 때문에 같은 동작 환경에서 수집된 데이터를 공유하는 기능만 갖고 있습니다.
클라우드 로봇 산업의 표준화
현재 클라우드 로봇 산업은 다른 컴퓨팅 산업들과 다르게 공통적인 인터페이스나 로봇 간의 통신 표준을 가지고 있지 않습니다. 운영체제 역시 윈도우, 리눅스, RTOS, 안드로이드 등 각각 다양한 운영체제를 사용하고 있어, 기술 개발이 더뎌지고 있습니다.
따라서 로봇 산업 기술의 촉진과 로봇 소프트웨어 마켓의 활성화를 위해서는 운영 체계뿐만 아니라 로봇 앱, 공통 인터페이스와 통신 표준 등의 표준화가 매우 필요합니다.
현재 한국의 OPRoS나 미국의 ROS등의 로봇 SW프레임워크인 VWNS가 있으며 응용 프로그램의 인터페이스는 RoIS(Robot Interaction Service)와 RLS(Robot Localization Service)등의 표준이 있습니다. 하지만 아직 발달 단계에 머무르고 있으므로 더욱 확산된 공통 인프라를 구축하고 이를 표준화, 글로벌화 할 필요가 있습니다.
지금까지 클라우드 로봇의 개념과 플랫폼 연구 동향에 대해 말씀드렸는데요. 클라우드 로봇 시장은 이제 형성되고 있으며, 4차 산업혁명과 더불어 더욱 성장할 것으로 예측됩니다. 우리나라 로봇 시장은 2020년에 1조 원을 내다보고 있으며, 세계 서비스 로봇 시장 역시 2020년에 60조원 규모를 내다보고 있습니다. 앞으로 우리나라가 기술개발을 통해 로봇 클라우드 서비스 시장에서 좋은 성과를 내기를 기대해 보겠습니다.
글 | 조영임 교수 | 가천대학교 컴퓨터공학과
고려대학교 컴퓨터학과 생물학을 전공하여 학사를 마쳤으며, 동 대학원 컴퓨터학과에서 석박사학위를 취득했다. Univ. of Massachusetts에서 post-doc을 했으며 Purdue대학교의 교환교수로 근무했다. 현재 가천대학교 컴퓨터공학과에 교수로 재직 중이다. 주요 관심분야는 인공지능, 플랫폼, IoT, 스마트 시티, 전자정부 등 인공지능의 기본연구와 융복합 연구 등이다. 현재 지능형 융복합 스마트시티 플랫폼과 차세대 전자정부 시스템, 클라우드 서비스 로봇관련 연구를 수행하고 있다.


